
The flight controller of Flying Squirrel #1 is the brains of the flight. The controller will measure the environment around the balloon, format the data into a Telemetry message and transmit the telemetry signal back to the ground using the chosen protocol (FSQ) for the flight. The flight controller will also manage the power to […]

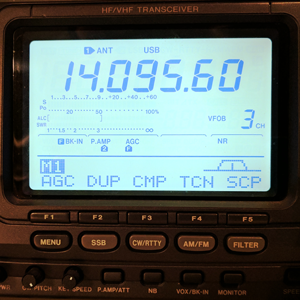
Now that I have a list of protocols and a general plan to transmit telemetry on the 20 meter Ham bands, how do I get “on the air”? This post will describe the transmitter hardware for the telemetry system. Generating Radio Frequency – There is a board for that. After a lot of searching an […]
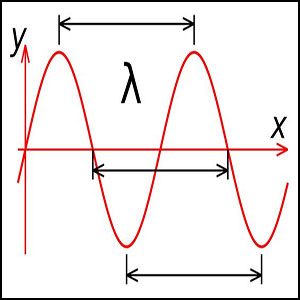
What’s the frequency Kenneth? The big unknown for me, at least at the start, is how am I going to know where the balloon has traveled. I need to be able to send radio telemetry from the balloon back to the ground somehow. My stated project goal that the balloon be capable of global circumnavigations, […]
As if squirrels are not distracting enough, flying squirrels are the ultimate squirrel chase! Right? Well at least I think so. If you agree, read on. This squirrel chase started with the May 2017 issue of QST Magazine in hand. Page 79 to be exact. There on the page was an article that became a […]